 Circuit
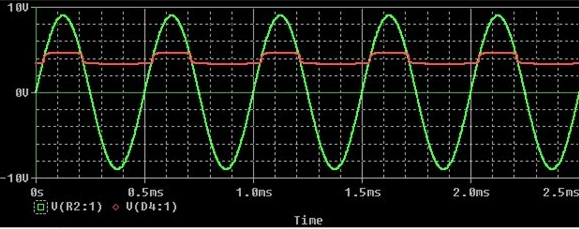
Circuit PSpice:デフォルトの波形の太さを変更する方法
回路シミュレーションする時に"OrCAD 16.0"に入ってるPSpiceを使っています。
電圧・電流波形を見る時にデフォルトの状態だと、非常に線が細くなっていて、そのままスクショしてパワポに貼り付けだと結構見辛いんですね。
Circuit  Electronics Electronics Electronics Electronics
Electronics Electronics Electronics Electronics  Electronics
Electronics  Electronics
Electronics  Electronics
Electronics  Electronics
Electronics  Electronics
Electronics