
As I’m getting the hang of using a 3D printer, I’ve decided to start creating an original robot.
Completion Image
- The project involves making a four-legged spider-type robot.
- The goal is to achieve something akin to Tachikoma from “Ghost in the Shell,” but the primary aim is to establish the basics.
- I intend to make it autonomously mobile by equipping it with distance sensors, among other things. Eventually, I want to implement features that support human life.
- The image is as per the video below.
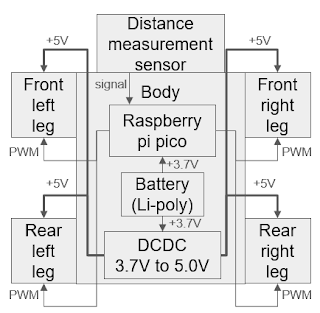
Configuration Diagram
I’m planning to decide on the features as I build, but for now, the goal is to make it walk around a room without hitting obstacles.
- The size will be about small enough to fit on a palm, roughly 150mm x 150mm.
- The entire casing will be made with a 3D printer.
- Eight servo motors are used in total, two for each leg.
- For the microcontroller, a Raspberry Pi Pico is applied.

Design of the Chassis
I’ve started with the legs.
I designed three parts in Fusion360: the tip of the leg, the leg itself, and the connection to the main body.
Though I say three parts, the leg and the body connection are designed as a common component, so in reality, there are only two distinct designs.

I’ve incorporated the following servo and horn, with thanks to the creator. I plan to use a servo called MS18.
I’ve also started on the body, and it’s in the picture, but I’ve managed to print it with the 3D printer.


Next, I guess I’ll move on to circuit design and get the legs moving.

コメント