 Electronics
Electronics ブラウザからロボをコントロールする /Raspberry pi pico /MS18
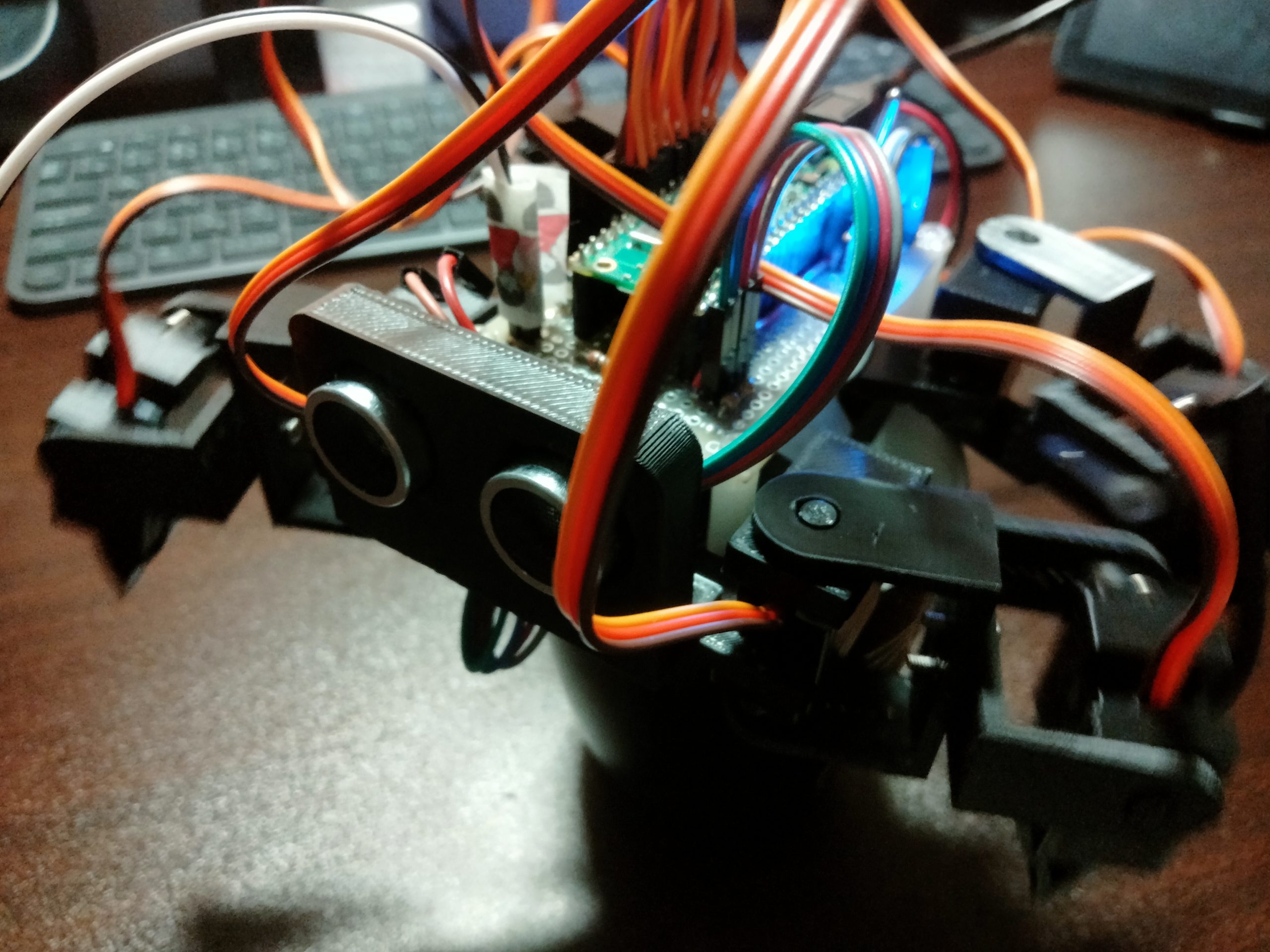
4脚ロボットの機能面の強化を図っています。
今回はブラウザから指示してロボを操作する機能を実装してみました。
ブラウザ入力とサーボ制御の並列化で結構はまりましたが、うまく動かすところまでいけました。
Electronics Electronics  Electronics
Electronics