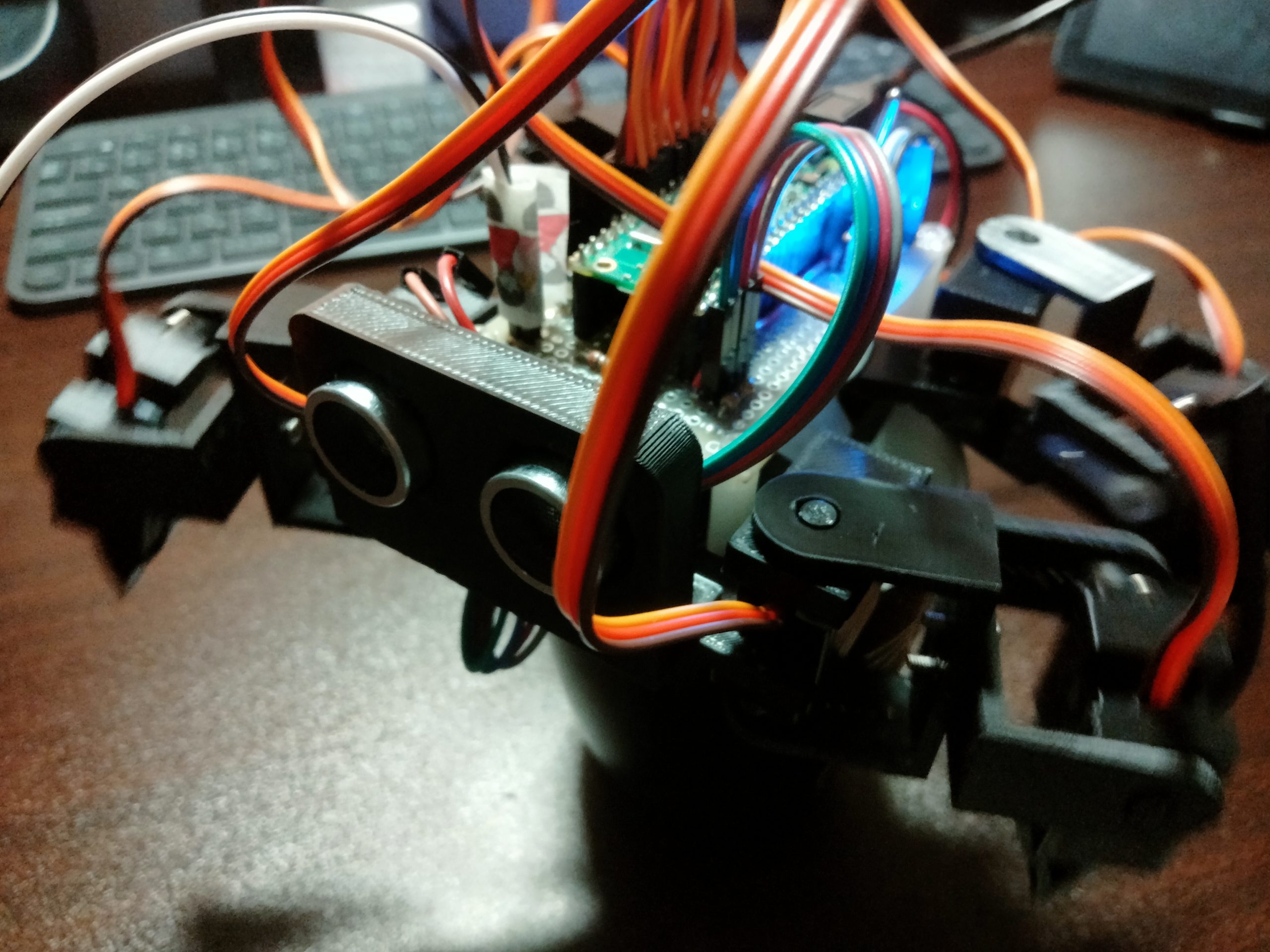
I’ve made a step forward from last time, now achieving a forward-moving action.
My 3D printer uses PLA material, which tends to slip on frictionless surfaces, but on other surfaces (like a soldering pad, as shown in the video), it moves forward smoothly.
When designing the movements, it’s necessary to translate each servo’s motion into angles, which can be quite a brain exercise.
I wonder if using reinforcement learning could streamline this process. Maybe it would learn to move in more efficient ways than those a human might think of.
Program
from machine import Pin, PWM
import time
SV_FREQ = 50.0 #Hz
MAX_DUTY = 65535.0 #uint16 max
MIN_SV_PULSE = 0.5 #ms
MAX_SV_PULSE = 2.5 #ms
def get_pulse_width(angle):
pulse_ms = MIN_SV_PULSE + (MAX_SV_PULSE - MIN_SV_PULSE)*angle/180.0
x = (int)(MAX_DUTY * (pulse_ms*SV_FREQ/1000.0))
return x
correction = [0, 0, 10, 0, 0, 0, -10, -5]
temp_angle = [90, 90, 90, 90, 90, 90, 90, 90]
servo = []
angle_i = [ 90, 90, 90, 90, 90, 90, 90, 90]# Initial position
angle = [ [ 60, 90, 90, 90, 90, 90, 60, 90],
[ 60, 60, 90, 60, 90, 120, 60, 120],
[ 90, 60, 120, 60, 120, 120, 90, 120],
[ 90, 90, 120, 90, 120, 90, 90, 90],
[ 90, 120, 120, 120, 120, 60, 90, 60],
[ 60, 120, 90, 120, 90, 60, 60, 60] ]
servo.append(PWM(Pin(2))) #Front Right Leg
servo.append(PWM(Pin(3))) #Front Right Shoulder
servo.append(PWM(Pin(4))) #Front Left Leg
servo.append(PWM(Pin(5))) #Front Left Shoulder
servo.append(PWM(Pin(6))) #Rear Right Leg
servo.append(PWM(Pin(7))) #Rear Right Shoulder
servo.append(PWM(Pin(8))) #Rear Left Leg
servo.append(PWM(Pin(9))) #Rear Left Shoulder
snum = len(servo)
divide = 5 # Number of divisions between frames
div_counter = 0 # Counting divisions
key_frame = 0 # Current keyframe
next_key_frame = 1 # Next frame
# Move to initial position
for i in range(snum):
servo[i].freq(int(SV_FREQ))
servo[i].duty_u16(get_pulse_width(angle_i[i] + correction[i]))
time.sleep(1.0)
while True:
#Update keyframe
div_counter += 1
if div_counter >= divide:
div_counter = 0
key_frame = next_key_frame
next_key_frame += 1
if next_key_frame > 5:
next_key_frame = 0 # Back to angle[0]
#Degree calculation
for i in range(snum):
temp_angle[i] = angle[key_frame][i] + (angle[next_key_frame][i] - angle[key_frame][i])*div_counter/divide
print(key_frame)
# Servo drive
for i in range(snum):
servo[i].duty_u16(get_pulse_width(int(temp_angle[i])+correction[i]))
time.sleep(0.05)Next, I’ll implement turning.
Once turning is possible, I plan to enable it to walk around with obstacle detection. Next, I’ll consider incorporating a distance sensor for detecting obstacles.
コメント