
急にロボット作りたくなったので、下記電子書籍を購入。
筐体設計(Fusion360)、回路(KiCAD)、プログラム(MicroPython)、すべてを網羅的に記述されているので、一から作っている感じがあって、とても楽しかったし、どうやって2足歩行させるのかがわかってとても勉強になった。
2足歩行(調整が甘くてまっすぐ進まないが)ができるところまで持ってこれたので、つまづいたところとかをメモしておこうと思う。
購入したもの
書籍内だとざっくり書かれているところがあったので、実際に購入したものを具体的にしておく。
秋月で購入
- 【M-16132】Raspberry Pi Pico ラズベリーパイピコ x1
- 【I-04659】赤外線リモコン受信モジュールOSRB38C9AA(2個入) x1
- 【P-15704】スライドスイッチ 1回路2接点 基板用 横向き x1
- 【P-05002】アルミ電解コンデンサー100μF16V105℃ ルビコンMH5 x1
- 【I-00127】整流用ショットキーダイオード 40V1A 1S4 x1
- 【C-05779】分割ロングピンソケット 1×42 (42P) x1
- 【C-10099】ピンソケット(メス) 1×4(4P) x1
- 【C-00167】ピンヘッダ 1×40 (40P) x2
- 【P-13324】基板取付用スピーカー 9mm UDX01CLFPH x1
- 【M-07245】オプトサプライ赤外線リモコン x1
- 【M-14807】FEETECHサーボ FS0307 x12
Amazonで購入 以下それぞれ1個ずつ。
- 1 X EEMBリチウムポリマー電池3.7 V 320 mAh 402535 Lipo充電可能電池パックMolexコネクタ付き-購入前に機器とコネクタの極性を確認
※コネクタが小さいサイズなので要改造!2.54mmサイズのものである必要あり。 - Fenteer RCドローン充電ケーブル 3.7V USB → JST メスプラグ リチウム 電池充電ケーブル RC 航空機無人機
- 丸頭 小ネジ 十字穴付き プラスネジ ボルト ネジ なべ頭 ボルト プラスネジ 炭素鋼 ニッケルメッキ 9サイズ M2x4 M2x5mm M2x7 M2x8 M2x10 M2X12 M2.5X3 M2.5×5 M3X4 各30個 M2六角ナット100個付き 370個セット
- エスコ(Esco) 2 x 6mm 皿頭タッピングビス(ステンレス製/40本) EA949AL-203
- M2 六角スペーサー ワッシャー ネジナット ネジ 支柱PCBボード 六角支柱 セット 350個
つまづき
気を付けないと(というか恐らく初学者だとおそらく気が付かない)いけない点がいくつかあったので、メモしておく。
- FEETECHサーボ FS0307は秋月内のデータシート見ると、サーボ筐体固定穴が2個あった(サーボのサイズが本当にあっているかを確かめたかったのだが、、、)。書籍通り1つの穴ではあったので、到着するまでとても心配ではあった。
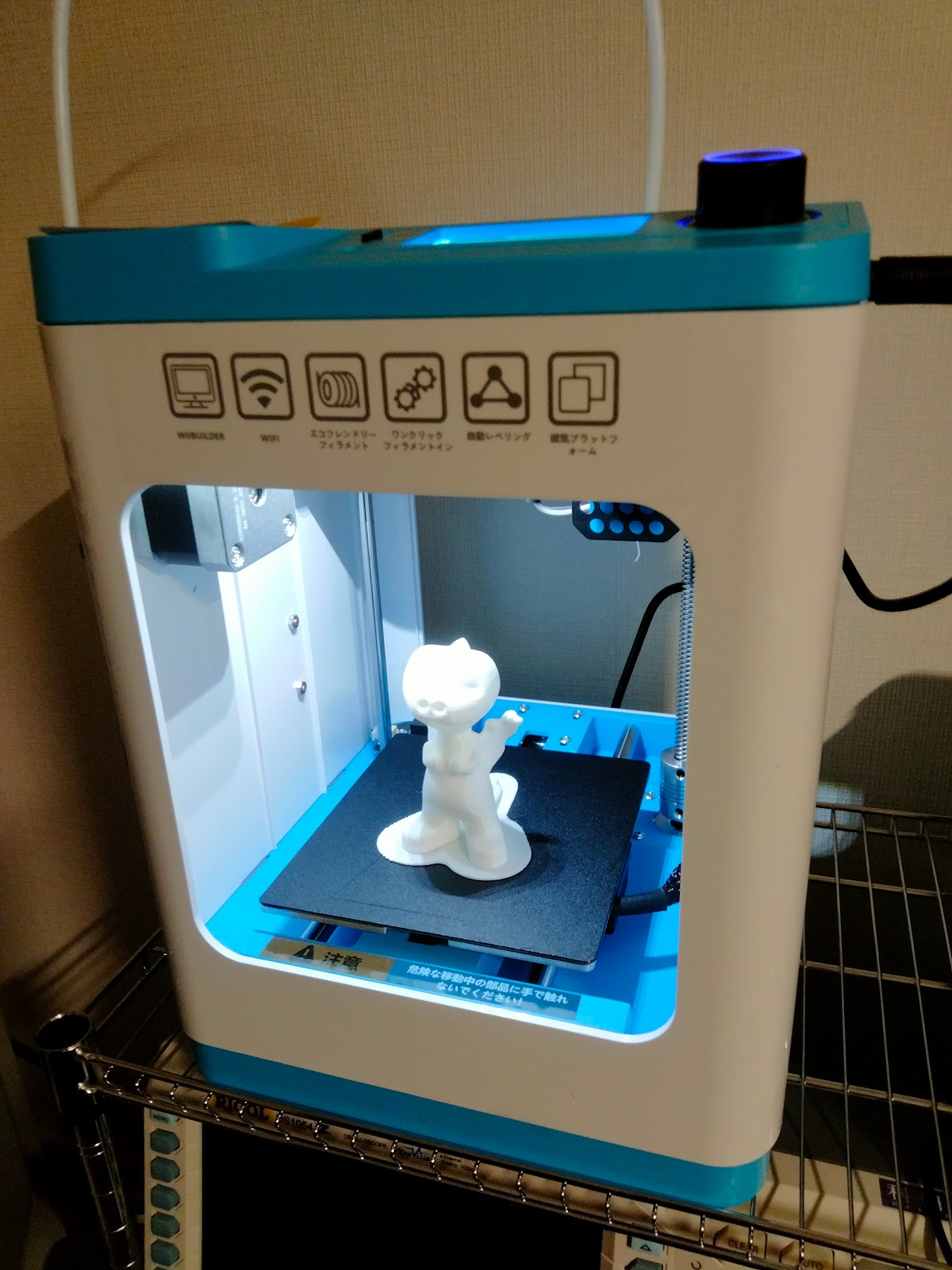
- 回路の部品配置は特に指定がなかったので感覚的に配置したが、これによって腕の方にあたる部分のサーボの位置が前に出っ張る形になった。書籍内ではスペーサ15mmの指定があるが20mmを使うことで何とか入った。
※写真真ん中のスペーサを20mmで対応。サーボとサーボ端子台がぎちぎちにつまってしまった。 - リチウムポリマ電池はものによって端子が変わってくるので、改造面倒ならJST2.54端子のものを選ぶ必要あり。
- 2足歩行させるプログラムに、
if next_key_frame > 1、
という記載があるが、
if next_key_frame > 5
にしておかないとうまく動かないので注意。
各ステップを格納する行が2行分しかリードされなくなってしまう。
※著者様のGithub上にプログラムはあります。
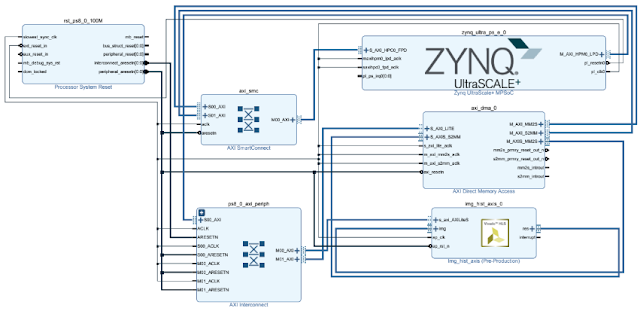
つまずき2のイメージ:

自身で設計した回路↓ サーボの3端子のピンヘッダを接触させても恐らく問題なく、それができていれば上記も問題なかったのだと思う。

その他
ELECROWというところで基板発注(書籍の通り、100mm×100mmを2種類)をしたが、それぞれ10個ずつ納入された。
他に使い道もないため、ほしい方おりましたら譲ろうかと思います。
(良いやり方ご存じであればご教示ください。メルカリとかでお譲りするとかでよいのですかね??)
コメント