
PYNQ-Z1ボードとUSBカメラ(logicool c270m)を使って、カメラ画像のSobelフィルタ結果をHDMIに出力してみた。
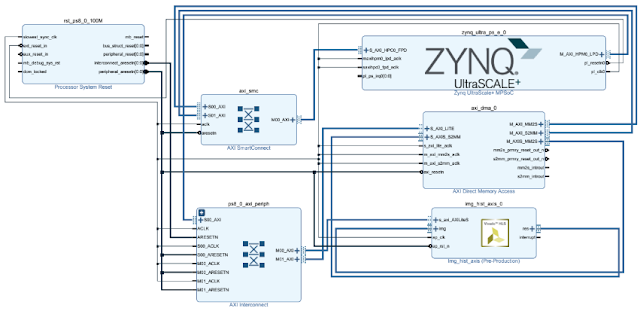
XilinxがOpenCVベースの画像処理をハードウェアを充実させてきているようで、以下をPYNQボードに入れ込むと簡単に画像処理の高速化を実装できる。
結果として、USBカメラの取り込みスピードに律速されてしまい、ハードウェアでのSobelフィルタによる高速化の恩恵が得られない結果になってしまった。
以下のコードをJupyter Notebookに貼って実行していけば確認できる。
※PYNQ-ComputerVisionのインストールは先にしておく必要あり。
以下のコードをJupyter Notebookに貼って実行していけば確認できる。
※PYNQ-ComputerVisionのインストールは先にしておく必要あり。
環境
- PYNQ-Z1ボード(PYNQイメージはv2.3)
- USBカメラ(logicool c270m)
A.HDMIとカメラの設定コード
# Load filter2D + dilate overlay
from pynq import Overlay
bareHDMI = Overlay("/usr/local/lib/python3.6/dist-packages/"
"pynq_cv/overlays/xv2Filter2DDilate.bit")
import pynq_cv.overlays.xv2Filter2DDilate as xv2
# Load xlnk memory mangager
from pynq import Xlnk
Xlnk.set_allocator_library("/usr/local/lib/python3.6/dist-packages/"
"pynq_cv/overlays/xv2Filter2DDilate.so")
mem_manager = Xlnk()
hdmi_out = bareHDMI.video.hdmi_out
from pynq.lib.video import *
frame_in_w = 1280 #Webcam maxsize=1280x720
frame_in_h = 720
Mode = VideoMode(frame_in_w,frame_in_h,8)
hdmi_out = bareHDMI.video.hdmi_out
hdmi_out.configure(Mode)
hdmi_out.cacheable_frames = False
hdmi_out.start()
mymode = hdmi_out.mode
print("My mode: "+str(mymode))
height = hdmi_out.mode.height
width = hdmi_out.mode.width
bpp = hdmi_out.mode.bits_per_pixel
import cv2
videoIn = cv2.VideoCapture(0)
videoIn.set(cv2.CAP_PROP_FRAME_WIDTH, frame_in_w);
videoIn.set(cv2.CAP_PROP_FRAME_HEIGHT, frame_in_h);
print("capture device is open: " + str(videoIn.isOpened()))
B.グレースケールにしてHDMIに出力する
import numpy as np
import cv2
from threading import Thread
import time
#Through: Camera input to HDMI output
def loop_hw1_app():
global outframe
numframes = 100
readt = 0
glayt = 0
start=time.time()
for _ in range(numframes):
readst = time.time()
ret, inframe = videoIn.read()
readet = time.time()
readt += (readet-readst)
if (not ret):
# Release the Video Device if ret is false
videoIn.release()
# Message to be displayed after releasing the device
print("Release camera resource")
break
else:
outframe = hdmi_out.newframe()
glayst = time.time()
outframe[:] = cv2.cvtColor(inframe, cv2.COLOR_BGR2GRAY)
glayet = time.time()
glayt = (glayet- glayst)
hdmi_out.writeframe(outframe)
end=time.time()
print("Frames per second: " + str(numframes / (end - start)))
print("Camera read time(Avg.): "+ str(readt/numframes*1000) + " ms")
print("Glayscale conv. time(Avg.): "+ str(glayt/numframes*1000) + " ms")
t = Thread(target=loop_hw1_app)
t.start()
プロファイリングの結果:
Frames per second: 10.595073612489498
Camera read time(Avg.): 71.09943151473999 ms
Glayscale conv. time(Avg.): 0.2248096466064453 ms
カメラのリードに律速されることがわかる。
C. Sobelフィルタをかけてから出力(ハードウェアで高速化) ※Aのコードは共通
import numpy as np
import cv2
from threading import Thread
import time
xFin = mem_manager.cma_array((frame_in_h,frame_in_w),np.uint8)
xFout = mem_manager.cma_array((frame_in_h,frame_in_w),np.uint8)
kernel_g = np.array([[1.0,0.0,-1.0],[2.0,0.0,-2.0],[1.0,0.0,-1.0]],np.float32)
def loop_hw2_app():
global kernel_g
global outframe
numframes = 100
start=time.time()
for _ in range(numframes):
ret, inframe = videoIn.read()
if (not ret):
# Release the Video Device if ret is false
videoIn.release()
# Message to be displayed after releasing the device
print("Release camera resource")
break
else:
outframe = hdmi_out.newframe()
frame_in_gray = cv2.cvtColor(inframe, cv2.COLOR_BGR2GRAY)
xFin[:] = frame_in_gray[:]
xv2.filter2D(xFin, -1, kernel_g, dst=outframe, borderType=cv2.BORDER_CONSTANT)
hdmi_out.writeframe(outframe)
end=time.time()
print("Frames per second: " + str(numframes / (end - start)))
t = Thread(target=loop_hw2_app)
t.start()
USBカメラの設定等変えれば高速化できるのだろうか?
結果は残念なことになってしまったが、こういうのが公開されているのを見ると、ソフトウェア屋がハードウェアをPoC目的等で高速化を試せるようなオープンソース環境が増えてきていると感じる(僕はハードウェア屋)。
どんどんやって欲しい。ハード屋でもソフトとのI/Fをどうすれば良いかとかHLSの書き方とか参考になるし。
おまけ:常時画像出力するコード(Jupyterの停止ボタンで出力停止)
while True:
ret, inframe = videoIn.read()
if (not ret):
# Release the Video Device if ret is false
videoIn.release()
# Message to be displayed after releasing the device
print("Release camera resource")
break
else:
outframe = hdmi_out.newframe()
frame_in_gray = cv2.cvtColor(inframe, cv2.COLOR_BGR2GRAY)
xFin[:] = frame_in_gray[:]
xv2.filter2D(xFin, -1, kernel_g, dst=outframe, borderType=cv2.BORDER_CONSTANT)
hdmi_out.writeframe(outframe)
コメント